Verifikation digitaler Systeme
Grundlagen
BDDs
| Zerlegung | low child | high child | |
|---|---|---|---|
| Shannon | \(f = x \land f_{\lvert x = 1} \lor (\neg x) \land f_{\lvert x = 0}\) | \(f_{\lvert x = 0}\) | \(f_{\lvert x = 1}\) |
| positive Davio | \(f = f_{\lvert x = 0} \oplus x \land (f_{\lvert x = 1} \oplus f_{\lvert x = 0})\) | \(f_{\lvert x = 0}\) | \(f_{\lvert x = 1} \oplus f_{\vert x = 0}\) |
| negative Davio | \(f = f_{\lvert x = 1} \oplus (\neg x) \land (f_{\lvert x = 1} \oplus f_{\lvert x = 0})\) | \(f_{\lvert x = 1}\) | \(f_{\lvert x = 1} \oplus f_{\vert x = 0}\) |
Simulation und Formale Verifikation
Simulation
- Evalulierung des Entwurfs durch Simulation von Stimuli, funktional oder zufällig gewählt.
- erfasst nicht das gesamte Verhaltensspektrum
- überprüft jeweils genau einen Punkt im Eingaberaum
- durch Eingabe getrieben
Formale Verifikation
- überprüft Gruppen von Punkten im Eingaberaum
- durch Ausgabe getrieben
Steuerbarkeit und Beobachtbarkeit
- Steuerbarkeit
- wie schwierig ist es, einen bestimmten (internen) Zustand in einem System einzustellen.
- Beobachtbarkeit
- wie schwierig ist es, einen bestimmten (internen) Zustand eines Systems zu beobachten.
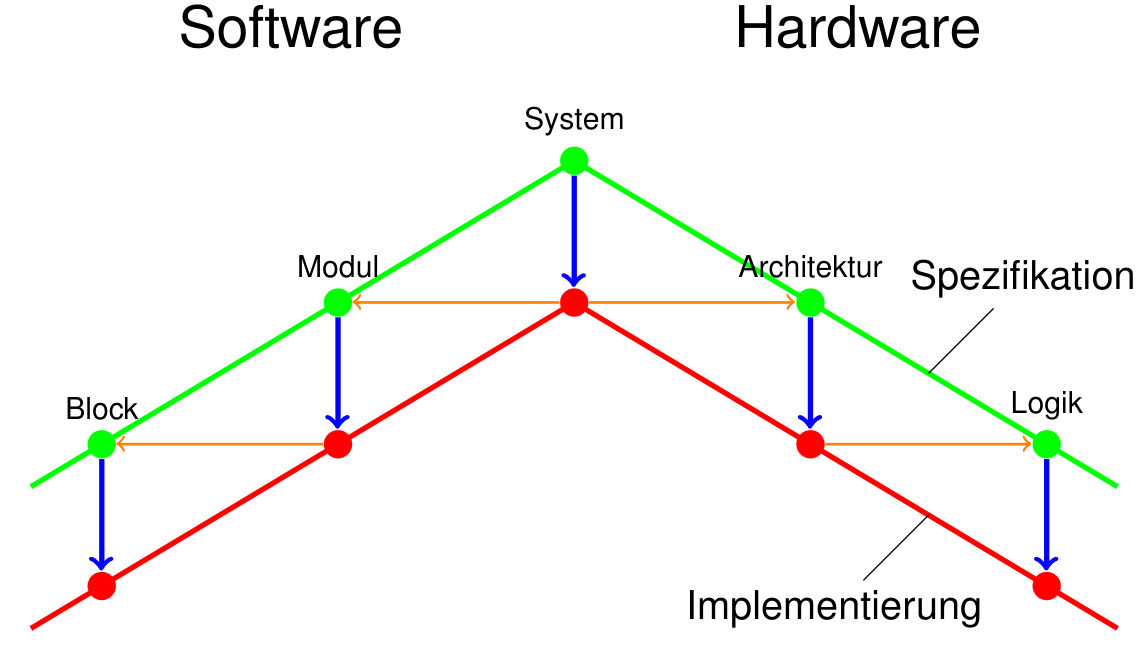
Abstraktion
- Strukturelle Abstraktion
- Interne Systemdetails werden verborgen
- Verhaltensabstraktion
- Partielle Spezifikationen, die das Verhalten nicht vollständig beschreiben
- Datenabstraktion
- Werte auf höheren Abstraktionsebenen darstellen (\(\mathbb{N}\) statt \(\mathbb{B}^n\))
- Zeitabstraktion
- Zeitraster vergröbern (Befehlszyklen statt Taktzyklen)
| Ebene | Verhalten | Struktur | Daten | Zeit |
|---|---|---|---|---|
| System | Algorithmen | Prozessoren, Busse, Speicher | Zahlen, Unions | Kausalität |
| Architektur | Mult,Add | ALUs, Multiplizierer | Bitvektoren | Takte |
| Logik | Boolesche Funktionen | Gatter, FlipFlops | Bits | Gatterlaufzeiten |
| Modul | Funktionen | Prozesse, OS-Dienste | Zahlen | Takte |
| Block | Instruktionen | Assemblerbefehle | Bytes | Instruktionsschritte |
Äquivalenzprüfung
Automatentheorie
Ein endlicher Zustandsautomat (Mealy) \(M = (S,E,A, \delta, \lambda, s_0)\).
- \(S\)
- endliche Menge von Zuständen
- \(E, A\)
- Ein- und Ausgabealphabet
- \(\delta : S \times E \to S\)
- Überführungsfunktion
- \(\lambda : S \times E \to A\)
- Ausgabefunktion
- \(s_0\)
- Startzustand
Sequenzen
- endliche Sequenzen von Eingangssymbolen \(w \in E^+\)
- erweiterte Überführungsfunktion \(\delta^+ : S \times E^+ \to S\)
\[ \delta^+ (s,w) := \begin{cases} \delta(s,w) & \lvert w \rvert = 1\\ \delta(\delta^+(s,w_1 \circ \dots \circ w_{\lvert w \rvert - 1}), w_{\lvert w \rvert}) & \lvert w \rvert > 1 \end{cases} \] - erweiterte Ausgabefunktion \(\lambda^+ : S \times E^+ \to S\)
\[ \lambda^+ (s,w) := \begin{cases} \lambda(s,w) & \lvert w \rvert = 1\\ \lambda^+(s,w_1 \circ \dots \circ w_{\lvert w \rvert - 1}) \circ \lambda(\delta^+(s,w_1 \circ \dots \circ w_{\lvert w \rvert - 1}), w_{\lvert w \rvert}) & \lvert w \rvert > 1 \end{cases} \]
Erreichbarkeit
Für \(T \subset S\) sei
Äquivalenzprüfung
Zwei Automaten \(M = (S, E, A, \delta, \lambda, s_0)\) und \(M' = (S', E, A, \delta', \lambda', s_0')\) heißen äquivalent (\(M \equiv M'\)) wenn
\[
\forall w \in E^+ .\, \lambda^+(s_0,w) = \lambda'^+(s'_0, w)
\]
Seien \(M = (S, E, A, \delta, \lambda, s_0)\) und \(M = (S', E, A, \delta', \lambda', s_0')\) zwei Automaten und \(s \in S, s' \in S'\) Zustände.
\(s\) und \(s'\) heißen zustandsäquivalent (\(s \sim s'\)), wenn
\[
\forall e \in E .\, \lambda(s,e) = \lambda'(s',e) \land \delta(s,e) \sim \delta'(s',e)
\]
Zwei Automaten \(M, M'\) sind genau dann äquivalent, wenn ihre Startzustände äquivalent sind.
\[
((S, E, A, \delta, \lambda, s_0) \equiv (S', E, A, \delta', \lambda', s_0')) \Leftrightarrow s_0 \sim s'_0
\]
Produktautomaten
Bei der Äquivalenzprüfung müssen nicht alle Kombinationen von Zuständen sondern nur die, in denen die Automaten zum gleichen Zeitpunkt sein können, verglichen werden.
Für zwei Automaten \(M = (S, E, A, \delta, \lambda, s_0)\) und \(M' = (S', E, A, \delta', \lambda', s_0')\) ist der Produktautomat \(M_p\) definiert als
und damit für die Zustandsäquivalenz:
\[
s \sim s' \Leftrightarrow \forall e \in E .\, \lambda_p((s,s'), e) = 1 \land \delta_p((s,s'),e) \in \sim
\]
und Automatenäquivalenz:
\[
M \equiv M' \Leftrightarrow \forall s \in \mathrm{REACH}(\{(s_0,s'_0)\}), e \in E .\, \lambda_p(s,e) = 1
\]
Äquivalenzprüfung durch Fixpunktiteration
- Forward Traversal
- Starte mit \(S_r \leftarrow \{s_0\}\) und \(S_n \rightarrow S_r\)
- Wenn \(\exists s \in S_n, e \in E .\, \lambda_p(s,e) = 0\) sind die Automaten nicht äquivalent.
- Sonst setze \(S_n \leftarrow \delta_p(S_n) \setminus S_r\) und \(S_r \leftarrow S_r \cup S_n\)
Bis \(S_n = \emptyset\)
- Starte mit \(S_r \leftarrow \{s_0\}\) und \(S_n \rightarrow S_r\)
- Backward Traversal
- Starte mit \(S_n \leftarrow \{s \in S \mid \exists e \in E .\, \lambda_p(s,e) = 0\}\) und \(S_e \leftarrow S \setminus S_n\)
- Wenn \(s_0 \in S_n\) dann sind die Automaten nicht äquivalent
- Sonst setze \(S_n \leftarrow \delta^{-1}(S_n) \cap S_e\) und \(S_e \leftarrow S_e \setminus S_n\)
Bis \(S_n = \emptyset\)
- Starte mit \(S_n \leftarrow \{s \in S \mid \exists e \in E .\, \lambda_p(s,e) = 0\}\) und \(S_e \leftarrow S \setminus S_n\)
Repräsentation von Funktionen
Für eine Menge von Funktionen \(F\) heißt \((R,\Phi : R \to F)\) Repräsentation von \(F\) und
\(r \in R\) repräsentiert \(f \in F\), wenn \(\Phi(r) = f\).
Eine Repräsentation \((R, \Phi)\) von \(F\) heißt
- vollständig, wenn \(\Phi\) surjektiv ist
- eindeutig, wenn \(\Phi\) injektiv ist
- kanonisch, wenn \(\Phi\) bijektiv ist
Eine Repräsentation ist sinnvoll wenn sie kanonisch ist, da dann Äquivalenz in der Repräsentation und der Funktionsmenge zusammenfallen.
Außerdem sollten
- Operationen wie \(\Phi(r) + \Phi(r')\), \(\Phi(r) \cdot \Phi(r')\) und \(-\Phi(r)\) effizient berechenbar
- Substititionen wie \([\Phi(r')/x]\Phi(r)\) effizient durchführbar
sein
Taylorreihen
Für ein Intervall \(I\) und eine beliebig oft differenzierbare Funktion \(f : I \to \mathbb{R}\) ist
\[
P_f(x) := \sum_{n=0}^{\infty}\frac{f^{(n)}(a)}{n!}\cdot(x - a)^n
\]
die Taylorreihe mit Entwicklungspunkt \(a \in I\)
TODO Taylorentwicklungsdiagramme (TED)
TODO Symbolisch
Die binäre Kodierung einer Menge \(E\) ist gegeben durch
\[
\sigma_E : E \to \mathbb{B}^n, \text{mit } n \geq \log_2(\lvert E \rvert)
\]
Eine boolesche Funktion ist eine Abbildung \(f : \mathbb{B}^n \to \mathbb{B}\).
z.B
| \(x_1\) | \(x_2\) | \(x_3\) | \(f(x_1,x_2,x_3)\) |
|---|---|---|---|
| 0 | 0 | 0 | 0 |
| 0 | 0 | 1 | 1 |
| 0 | 1 | 0 | 1 |
| 0 | 1 | 1 | 0 |
| 1 | 0 | 0 | 1 |
| 1 | 0 | 1 | 1 |
| 1 | 1 | 0 | 1 |
| 1 | 1 | 1 | 1 |
- Eine Bewertung ist eine Abbildung \(V \to \mathbb{B}\), wobei \(V\) die Menge der Variablen darstellt.
- Eine Boolesche Funktion \(f\) heißt gültig, wenn sie für alle Bewertungen wahr ist
- Eine Boolesche Funktion \(f\) heißt erfüllbar, wenn eine wahre Bewertung existiert
Strukturell
Beweise Äquivalenz von System 1 und System 2 durch
- Äquivalenzbeweis von Subsystem 1.1 und 2.1
- Äquivalenzbeweis von Subsystem 1.2 und 2.2
Probleme stellen dabei False Negatives z.B
Aus System 1 ∼ System 2 und Subssystem 1.1 ∼ 2.1 folgt nicht, dass Subsystem 1.2 ∼ Subsystem 2.2
Da an den Schnittpunkten nicht alle Wertebelegungen einstellbar sein müssen.
Daher:
- teurer Erfüllbarkeitstest an den Schnittpunkten
- don't-care-Bedingungen
- mehrere überlappende Schichten auf Äquivalenz prüfen
OFDDs
Die positive Davio-Dekomposition einer booleschen Funktion \(f\):
\[
f(x_1,\dots,x_n) = f_{\lvert x = 0} \oplus x_i \land (f{\lvert x = 1} \oplus f{\lvert x = 0})
\]
Temporale Aussagenlogik
Eine temporale Struktur \(M = (S,R,L)\) über einer Menge atomarer Formeln \(V\) besteht aus
- einer Menge von Zuständen \(S\)
- einer linkstotalen Übergangsrelation \(R \subset S \times S\)
- einer Markierungsfunktion \(L : S \to \mathcal{P}(V)\)
Ein Pfad in einer temporalen Struktur \(M\) ist eine unendliche Folge \(s = (s_0,s_1,\dots)\) von Zuständen mit
\[
\forall i \in \mathbb{N} .\, (s_i, s_{i + 1}) \in R
\]
Der Suffix \(s^{(j)}\) eines Pfades \(s\) ist \(s^{(j)} = (s_j, s_{j+1},\dots)\)
Linear Time Logic (LTL)
Hier gibt es keine Verzweigungen in der temporalen Struktur, d.h. es existiert genau ein Pfad.
| Temporaler Operator | Bedeutung | |
|---|---|---|
| \(\mathrm{X} \Psi\) | next | \(\Psi\) gilt im nächsten Zustand |
| \(\mathrm{F} \Psi\) | finally | \(\Psi\) gilt in einem Zustand |
| \(\mathrm{G} \Psi\) | globally | \(\Psi\) gilt in jedem Zustand |
| \(\Phi \mathrm{U} \Psi\) | until | \(\Phi\) gilt bis zu einem Zustand (der existieren muss) in dem \(\Psi\) gilt |
| \(\Phi \mathrm{R} \Psi\) | release | \(\Psi\) gilt solange, bis auch \(\Phi\) gilt |
Computation Tree Logic (CTL)
Erweitert LTL mit Verzweigungen in der temporalen Struktur und Quantoren:
| Pfadquantor | Bedeutung |
|---|---|
| \(\mathrm{E}\Psi\) | Es existiert ein Pfad in dem \(\Psi\) gilt |
| \(\mathrm{A}\Psi\) | \(\Psi\) gilt für alle Pfade |
Einem LTL-Operator in \(\Psi\) muss immer ein Pfadquantor vorangestellt werden, um eine valide CTL-Formel zu erhalten.
\(\Psi\) muss außerdem quantorenfrei sein (\(\mathrm{AFAG} \Phi\) ist also keine CTL-Formel!).
Somit ergeben sich acht Grundoperatoren mit Basis \(\{\mathrm{EX}, \mathrm{EG}, \mathrm{EU}\}\):
CTL*
Nicht alle LTL-Formeln lassen sich in CTL ausdrücken, und umgekehrt.
| Formel | LTL | CTL | CTL* |
|---|---|---|---|
| \(\mathrm{AFG}\Psi\) | ✅ | ❌ | ✅ |
| \(\mathrm{EX}\Psi\) | ❌ | ✅ | ✅ |
| \(\mathrm{AG}\Psi\) | ✅ | ✅ | ✅ |
| \(\mathrm{EX}\Psi \land \mathrm{AFG}\Psi\) | ❌ | ❌ | ✅ |
CTL* übernimmt die temporalen Operatoren von CTL, es muss aber kein Pfadquantor direkt vorangestellt werden und Pfadquantoren dürfen geschachtelt werden.
CTL* ist also ein Superset von CTL und LTL (wobei LTL-Formel implizit \(\mathrm{A}\) -quantifiziert werden).
TODO Formale Eigenschaftsprüfung
Sei \(M = (S,R,L)\) ein endlicher Automat als temporale Struktur mit
- \(S\) Menge der Zustände
- \(R \subset S \times S\) Übergangsrelation
- \(L : S \to \mathcal{P}(V)\) die Label-Funktion
Systemeigenschaften sind {LTL,CTL,CTL*}-Formeln
Identfiziere im Folgenden:
- CTL-Formel \(\Phi\) mit der Menge der Zustände \(S_\Phi \subseteq S\) in denen \(\Phi\) gilt
- \(\Phi \land \Psi\) mit \(S_\Phi \cap S_Psi\) und \(\Phi \lor \Psi\) mit \(S_\Phi \cup S_\Psi\)
- \(\neg\Phi\) mit \(S \setminus S_\Phi\)
- \(\mathtt{true}\) mit \(S\) und \(\mathtt{false}\) mit \(\emptyset\)
Sei \(\Phi\) eine Formel und \(y\) eine Variable in \(\Phi\).
Dann ist \(\tau = \lambda y.\, \Phi\) ein Funktional.
Eine Formel \(p\) heißt Fixpunkt eines Funktionals \(\tau\), wenn \(\tau(p) = p\)
Ein Funktional \(\tau\) heißt monoton, wenn \(p \subset q \implies \tau(p) \subset \tau(q)\)
Für ein monotones Funktional \(\tau := \lambda y .\, \Phi\) existiert der kleinste Fixpunkt
\[
\mu y.\, \Phi
\]
als Schnitt aller Fixpunkte von \(\tau\)
Für ein monotones Funktional \(\tau := \lambda y .\, \Phi\) existiert der größte Fixpunkt
\[
\nu y.\, \Phi
\]
als Vereinigung aller Fixpunkte von \(\tau\)
Sei \(\tau = \lambda y.\, \Phi\) ein monotones Funktional und \(\Phi\) eine CTL-Formel, dann
Wobei \(\tau^i\) die \(i\) -fache Komposition von \(tau\) mit sich selbst ist (\(\tau^0(p) = p\))
Für CTL-Formel gilt:
TODO Symbolic Model Checking
Bounded Model Checking
Grundidee: Restriktiere auf Pfade der Länge \(k\), falte auf und reduziere auf SAT.
Simulationsbasierte Eigenschaftsprüfung
Assertions
- statisch
- "zero-time"-Bedingungen die funktionale Korrektheit garantieren
- temporal
- garantieren funktionale Korrektheit über eine Zeitperiode
Überdeckung
- Code-Überdeckung
- auf einer konkreten Entwurfssprache
- Anweisungsüberdeckung
- Anteil der durchlaufenden Statements
- Grundblocküberdeckung
- Anteil der durchlaufenden Blöcke (Statements zu feingranular)
- Pfadüberdeckung
- Anteil der durchlaufenden Pfade
- Zweigüberdeckung
- Anteil der durchlaufenden Zweige (nicht äquivalent zu Pfaden!)
- Funktionale Überdeckung
- auf einem formalen Modell
- Parameterüberdeckung
- Entwurfssprache oder formales Modell
Softwareverifikation
Uninterpretierte Funktionen
Um von der Funktionalität zu abstrahieren wird nur Kongruenz gefordert:
\[
a = b \implies f(a) = f(b)
\]
z.B. Äquivalenz zweier C-Programme
a1 = b1 + c1;
tmpB2 = b2; tmpC2 = c2; a2 = tmpB2 + tmpC2;
Es ergeben sich schrittweise die Äquivalenzklassen:
Falschnegative Ergebnisse
Hier entstehen falschnegative Ergebnisse, da z.B. \(f_{\mathrm{mult}}(a,b) = f_{\mathrm{mult}}(b,a)\) nicht herleitbar ist.
Entsprechend werden die nötigen Axiome hinzugefügt.
Falschpositive Ergebnisse
Es wird von konkreten Datentypen abstrahiert (z.B \(\mathbb{R}\) statt Float).
Insbesondere gilt in Float die Identität \((x+y) - z = (x - z) + y\) nicht
Die entsprechenden Datentypen müssen also hinzugefügt werden.
PDG
Symbolische Simulation skaliert schlecht für größere Programme.
Deshalb interessante Stellen (Verifikationsbereiche) mittels PDG wählen.
Ein Program Dependency Graph ist ein bipartiter Graph \((V_P \uplus V_Z, E_C \uplus E_D)\) wobei
- \(V_P\) Prädikate von kond. Sprüngen
- \(V_Z\) Zuweisungen
- \(E_C\) Kontrollfluss
- \(E_D\) Datenabhängigkeiten
darstellen
Statische Analyse
- Konkrete Interpretation
- führe Programm aus und teste Wertebereich
- Abstrakte Interpretation
- teste Wertebereiche
- Vorzeichen-Wertebereich
pos,neg,zero- Kongruenz-Wertebereich
- \(x \bmod k\) für \(k \in \mathbb{N}\)
- Intervall-Wertebereich
- \(\{[a,b] \mid a \leq b, a,b \in \mathbb{Z}\}\)
Hoare-Logik
siehe SemProg
Zeitanalyse
- Core Execution Time
- Ausführungszeit ohne Unterbrechungen
- Best Case Execution Time (BCET)
- Bestmögliche Ausführungszeit
- Worst Case Execution Time (WCET)
- Schlechtestmögliche Ausführungszeit
Die Analyse kann in zwei (nicht unabhängige) Teilprobleme zerlegt werden:
- Programmpfadanalyse
- welche Ausführungspfade führen zur schnellsten/langsamsten Ausführung
- Modellierung der Zielarchitektur
- Architekturmerkmale wie Caches, Pipelining usw.
Hierbei gibt es die Möglichkeiten:
- Instruction Time Addition
- Annahme: jede Instruktion hat konstante Ausführungszeit
- Path Segment Simulation
- zyklenakurate Modellierung
Echtzeitscheduling
Ein Task-Graph ist ein Tupel \(G = (V,E)\) mit
- \(V\) Menge der Tasks
- \(E \subset V \times V\) Menge der Task-abhängigkeiten
- \(t_d : V \to \mathbb{R} \cup \{\infty\}\) ordnet jedem Task eine Deadline zu
- \(\Delta t : V \to \mathbb{R}\) ordnet jedem Task eine Ausführungsdauer zu
Für einen Ablaufplan
- \(t_s,t_e : V \to \mathbb{R}\) ordnen jedem Task Start- und Endzeitpunkt zu
- \(t_L(v) := t_e(v) - t_d(v)\) ordnet jedem Task seine Lateness (d.h Abweichung des Endzeitpunkts von der Deadline) zu
Latest-deadline-first (LDF)
- iterativ Task einreihen der
- keine uneingereihten nachfolgenden Tasks hat
- die größte Deadline hat
- keine uneingereihten nachfolgenden Tasks hat
- drehe die Ergebnisliste um
Erzeugt einen Ablaufplan mit minimaler maximaler Lateness
Earliest-deadline-first (EDF)
Weitere Bedingungen:
\(t_r : V \to \mathbb{R}\) ordnet jedem Task den Zeitpunkt zu, ab dem er gestartet werden kann (Release-Zeit)
EDD erzeugt damit Ablaufpläne mit unnötig hoher maximaler Lateness.
Deshalb:
- Nehme an, dass Tasks unterbrochen werden können
- Taskwechsel kosten keine Zeit
- Springe zum nächsten signifikanten Zeitpunkt (Task fertig oder Task erreicht Release-Zeit)
Wähle Task \(v^*\) mit kürzester Deadline
Unterscheide:
- der aktuelle Task ist \(v^*\) → v* läuft weiter
- sonst → unterbreche den aktuellen Task und starte \(v^*\)
goto1.
- der aktuelle Task ist \(v^*\) → v* läuft weiter
TODO Systemverifikation
Systeme können vor der Einteilung in Hardware/Software beschrieben werden.
SystemC
- Module realisieren eine konkrete Entität
- Ports erlauben die Kommunikation aus einem Modul heraus
- Signale und Channels modellieren die Kommunikationskanäle
- Methoden führen Operationen aus, getriggert durch Sensitivitätsliste
- Threads führen Operationen aus, starten automatisch
1-Bit Multiplizierer
SC_MODULE(one_bit_multi){ sc_in<bool> a,b; sc_out<bool> f; void compute() { f = a && b; } SC_CTOR(one_bit_multi) { SC_METHOD(compute); sensitive << a << b; } }; SC_MODULE(stim_gen){ sc_out<bool> a,b; void send_values() { a = true; b = true; wait(5, SC_NS); a = false; b = true; wait(5, SC_NS); a = false; b = false; wait(5, SC_NS); } SC_CTOR(stim_gen) { SC_THREAD(send_values); } }; int sc_main(int, char* []) { sc_signal<bool> a, b, f; one_bit_multi mul("Multiplizierer"); stim_gen generator("Tester"); mul.a(a); mul.b(b); mul.f(f); generator.a(a); generator.b(b); sc_start(); return 0; }
TODO Transaction Level Model
Transaktionen sind die Abstraktion der Kommunikation zwischen nebenläufigen Prozessen.
In SystemC sind Transaktionen
- blockierend
- nicht-blockierend
und
- loosely timed
- approximately timed
- cycle accurate